

Articles
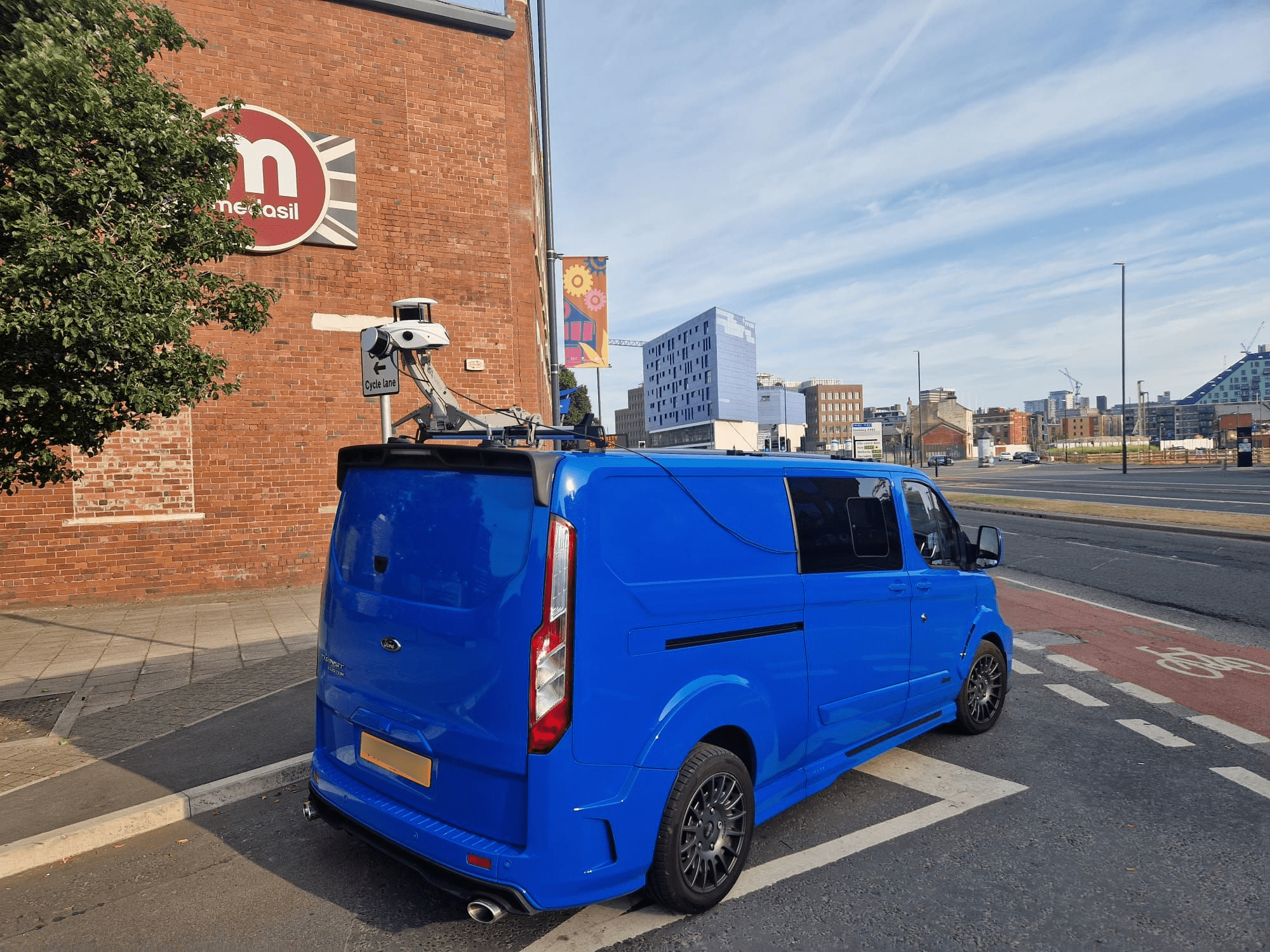
Carpack Heavy Kit: a new vehicle-mounted chassis for Viametris’ MS-96, designed for the most demanding road scanning missions
Carpack Heavy Kit: a new vehicle-mounted chassis for Viametris’ MS-96, designed for the most demanding road scanning missions Some 3D surveying missions can be long, technical and demanding. They require





{kind=link}
{kind=link}
{kind=link}